Введение:
С развитием индустрии искусственного интеллекта растет спрос на функции взаимодействия человека с машиной и качество продукции, поэтому разрабатываются промышленные декартовы роботы, которые становятся хорошим помощником для эффективного производства.

Принцип работы:
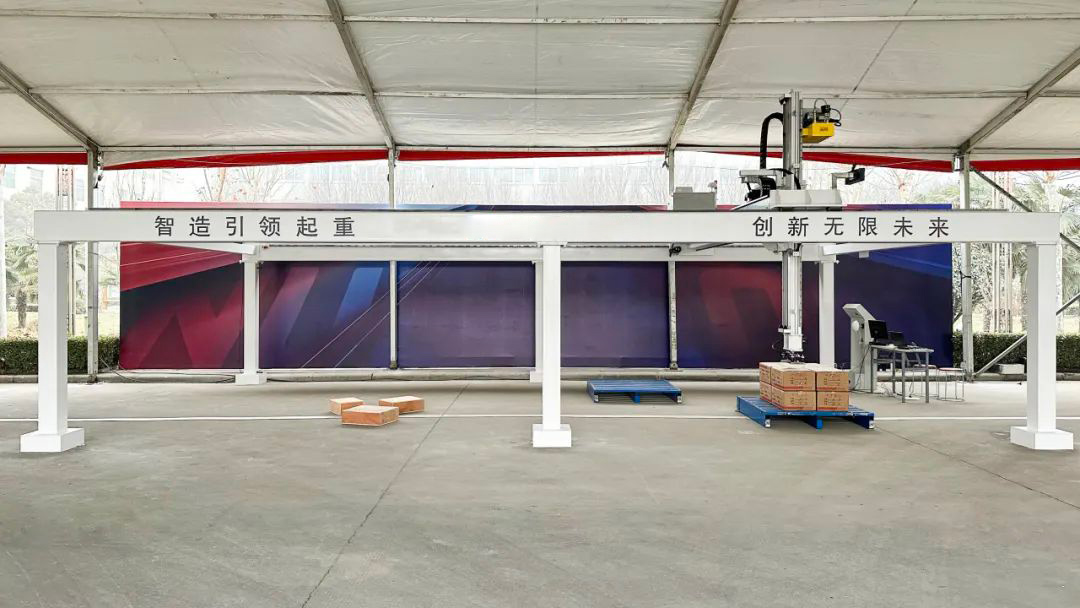
Декартовский робот, или линейный робот, или портальный робот, представляет собой промышленный робот с тремя линейными осями управления, расположенными под прямым углом друг к другу. Три сустава скользят вверх и вниз, внутрь и наружу, вперед и назад, что обеспечивает движение запястья. Оси перемещаются скоординировано с помощью контроллера движения. Три оси — это X, Y и Z, причем базовая ось обычно поддерживается по всей длине, а оси Y или Z являются консольными.
Приложение:
Этот портальный робот широко используется в таких областях промышленного производства, как дозирование, капельное формование, сборка, сварка, напыление, погрузка и разгрузка, обработка, сортировка, укладка на поддоны, интеллектуальное складирование и транспортировка.
Функции:
1. Точное позиционирование
Этот декартовский робот долговечен, прост в эксплуатации и может быть адаптирован к различным типам технологического оборудования и процессов. Он имеет функцию загрузки и разгрузки материалов и оснащен сервоприводом, зубчатой рейкой и прецизионным направляющим рельсом, которые позволяют точно определять местоположение.
2. Высокая эффективность
Этот декартовский робот часто сочетается со станками, приводными ремнями и силосами для формирования автоматизированных производственных линий, выполняющих загрузку и разгрузку, переворот заготовок и последовательность заготовок валов, пластин и дисков, тем самым снижая трудоемкость и повышая производительность. , что значительно повышает эффективность производства и экономит затраты на рабочую силу.
3. Хорошая гибкость
Ферменная конструкция этой роботизированной системы позволяет ей свободно перемещаться и регулироваться, обеспечивая тем самым выполнение разнообразных операций. Такая гибкость позволяет ферменным роботам адаптироваться к различным требованиям задач, таким как сборка, сварка, погрузка и т. д.
4. Безопасный и надежный
Этот робот оснащен современными датчиками и системами управления, которые могут отслеживать и регулировать состояние работы робота в режиме реального времени, достигать высокой точности работы и обеспечивать стабильность и надежность качества работы.

